Engineering Design Coursework
"Wicked FBD: Defying Gravity" Robot Competition
Project Overview
Project Description
Coursework for MIT 2.007 — Design & Manufacturing I. Students were tasked with designing, fabricating, and programming a competition robot within a constrained 13-week development cycle. The 2025 “Defying Gravity” challenge required robots to autonomously navigate obstacles, manipulate game elements, and transition into manual operation during live competition matches.
Advisor: Prof. Joshua Wiesman, Prof. Amos Winter
Project Details
I designed and fabricated a dual-mode robot capable of autonomous and RC-controlled operation using custom mechanical systems and embedded control logic.
Key features included:
Adjustable-height gearbox and flywheel system for interfacing with multiple game mechanisms
Hybrid autonomous/manual control architecture with photoelectric sensor triggering
Custom sheet metal chassis and drive train designed under strict size, weight, and energy constraints
Modular mounting geometry allowing rapid reconfiguration between competition rounds
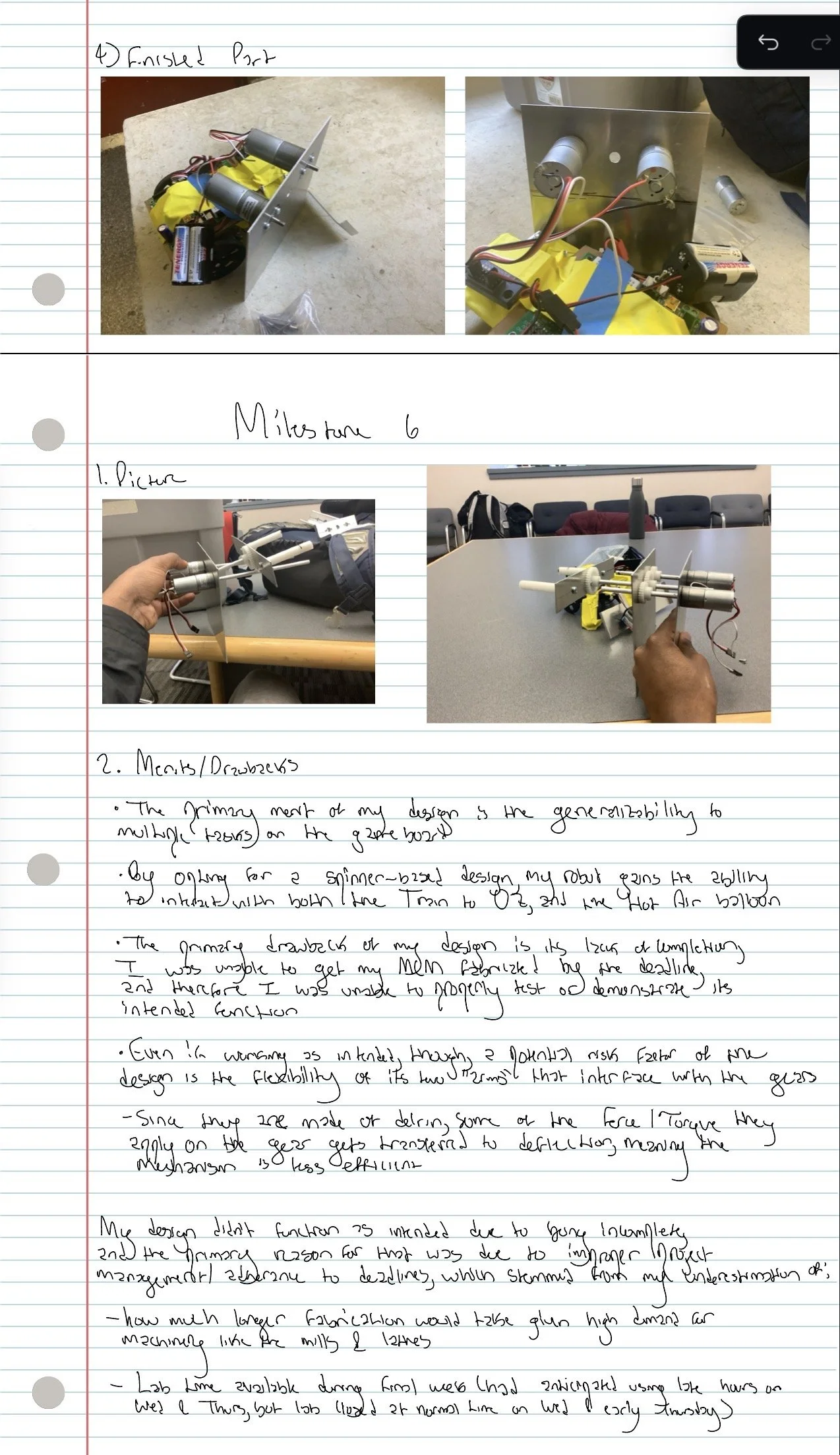
The robot successfully completed autonomous obstacle interaction and game-element manipulation tasks during competition testing and was awarded the Glinda Prize for robot design and aesthetics.

Design Challenge & Constraints
The primary challenge was designing a lightweight drive train capable of reliably interfacing with multiple rotating field elements while remaining stable on a 30° incline under strict size, weight, and energy constraints. The robot also needed to complete autonomous actions before transitioning seamlessly into RC-controlled operation.
Key constraints included:
Size: Robot must fit within 12" × 12" × 16" starting volume
Weight: 12 lb maximum; lighter robots earned scoring multipliers and tiebreaker advantages
Time: Full design-to-fabrication cycle compressed into 10 functional weeks (13-week semester minus initial concept phase)
Materials: Limited to lab-supplied components; max 8 motors, 6 in³ of 3D-printed parts, and 1 hour of waterjet cutting time
Energy: 50 kJ stored energy limit across batteries, compressed air, and elastic systems


Failure Modes & Design Strategy
The dominant risks for the obstacles I chose were
drive train stall on the incline,
loss of traction during climbing
inconsistent engagement with rotating field elements due to dimensional tolerances between competition setups.
To address these, my design centered around a flywheel-driven actuation system capable of engaging both the inclined train mechanism and balloon winch through adjustable-height positioning.
Drive Train & Actuation
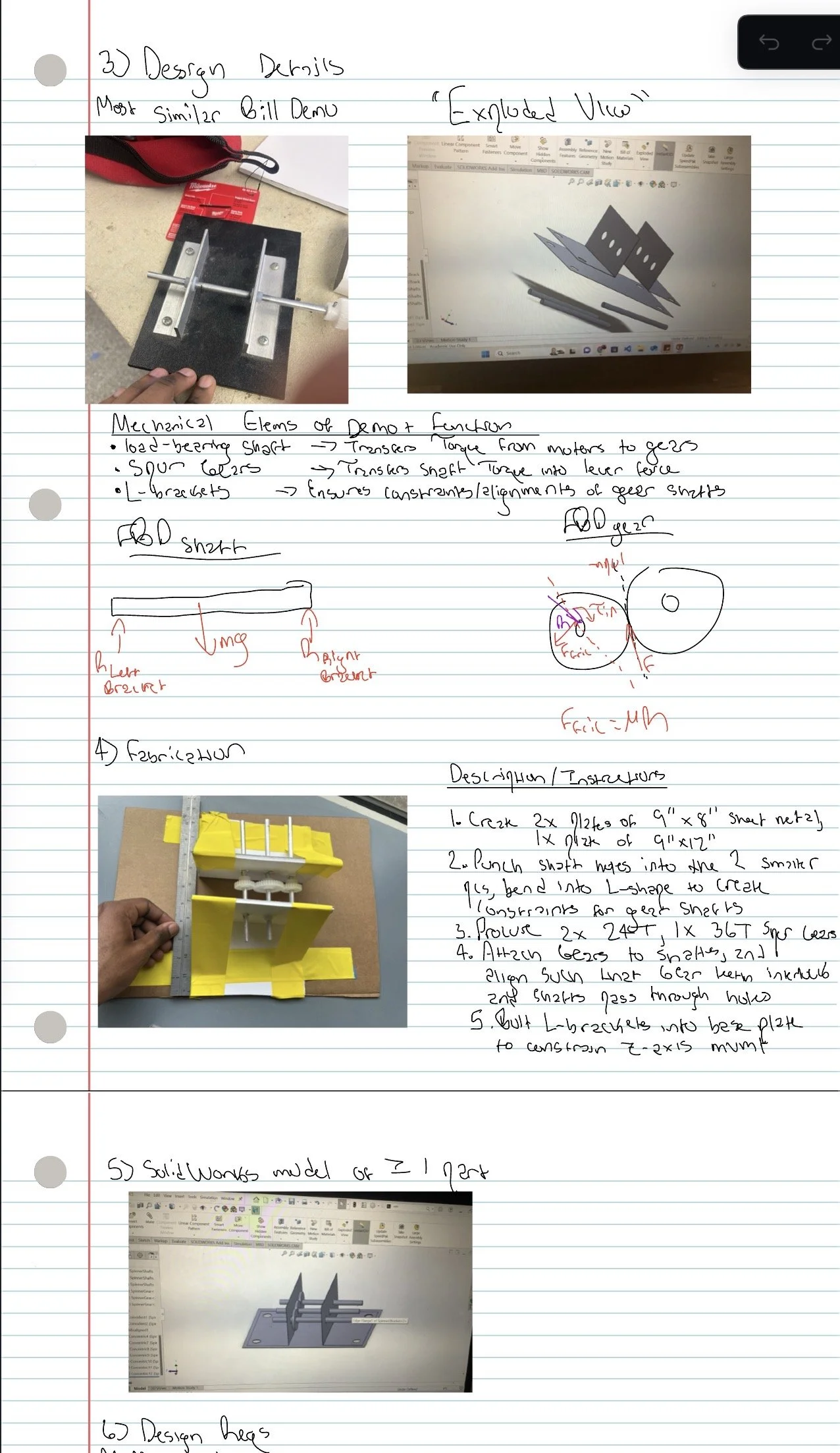
I evaluated several drive train and transmission layouts before selecting a spur-gear drive train for its packaging efficiency, torque transfer reliability, and manufacturability within the course fabrication constraints.
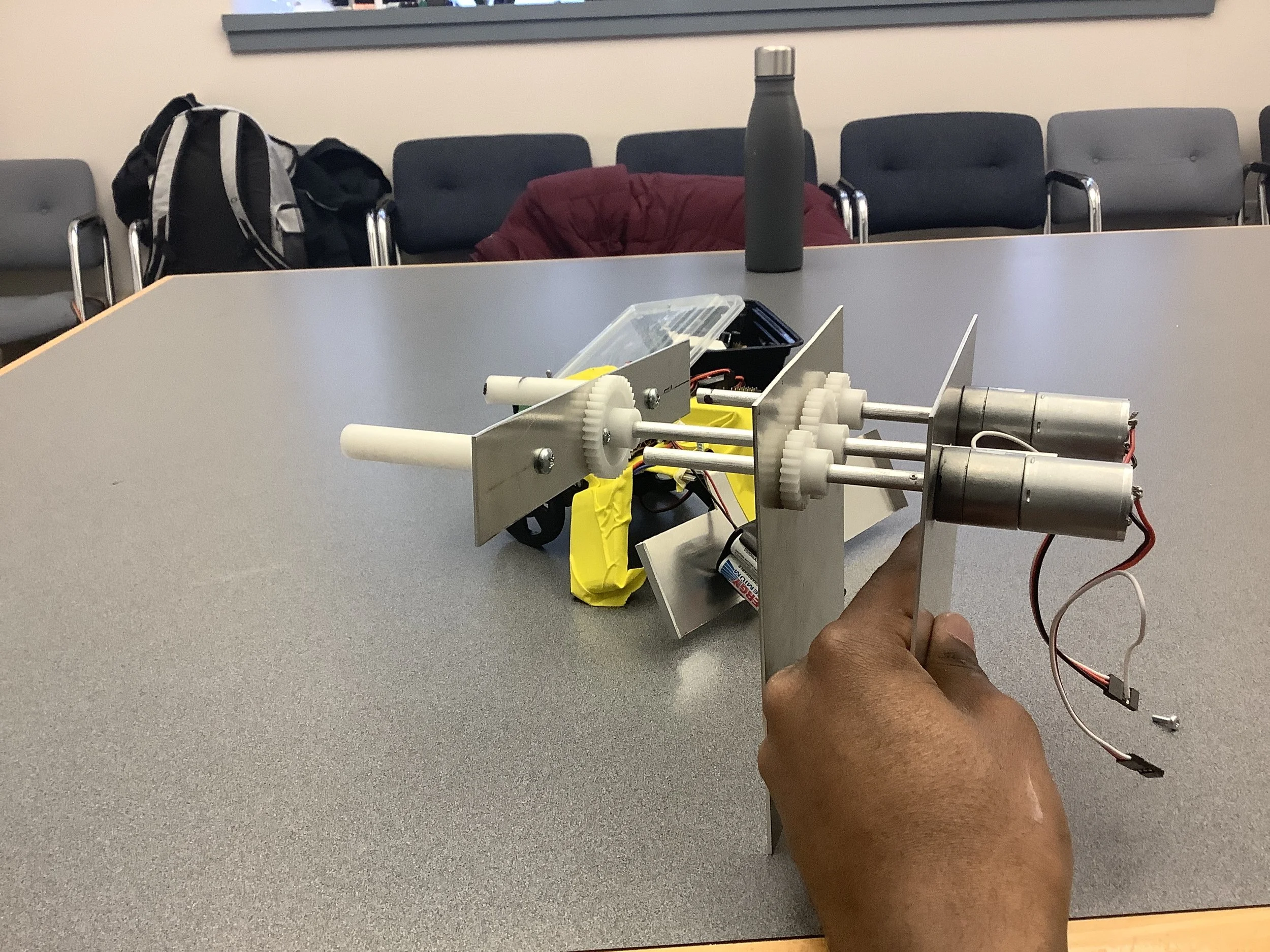
Custom gearbox with tab-slot adjustable mounting allowing on-the-fly height reconfiguration without disassembly—critical for adapting to field variations between competition rounds
Dual-motor flywheel system transferring torque through spur gears (calculated requirement: 0.762 Nm to drive train mechanism)
Sheet metal chassis with cantilevered L-bracket constraints, minimizing friction while maintaining 1-DOF shaft alignment
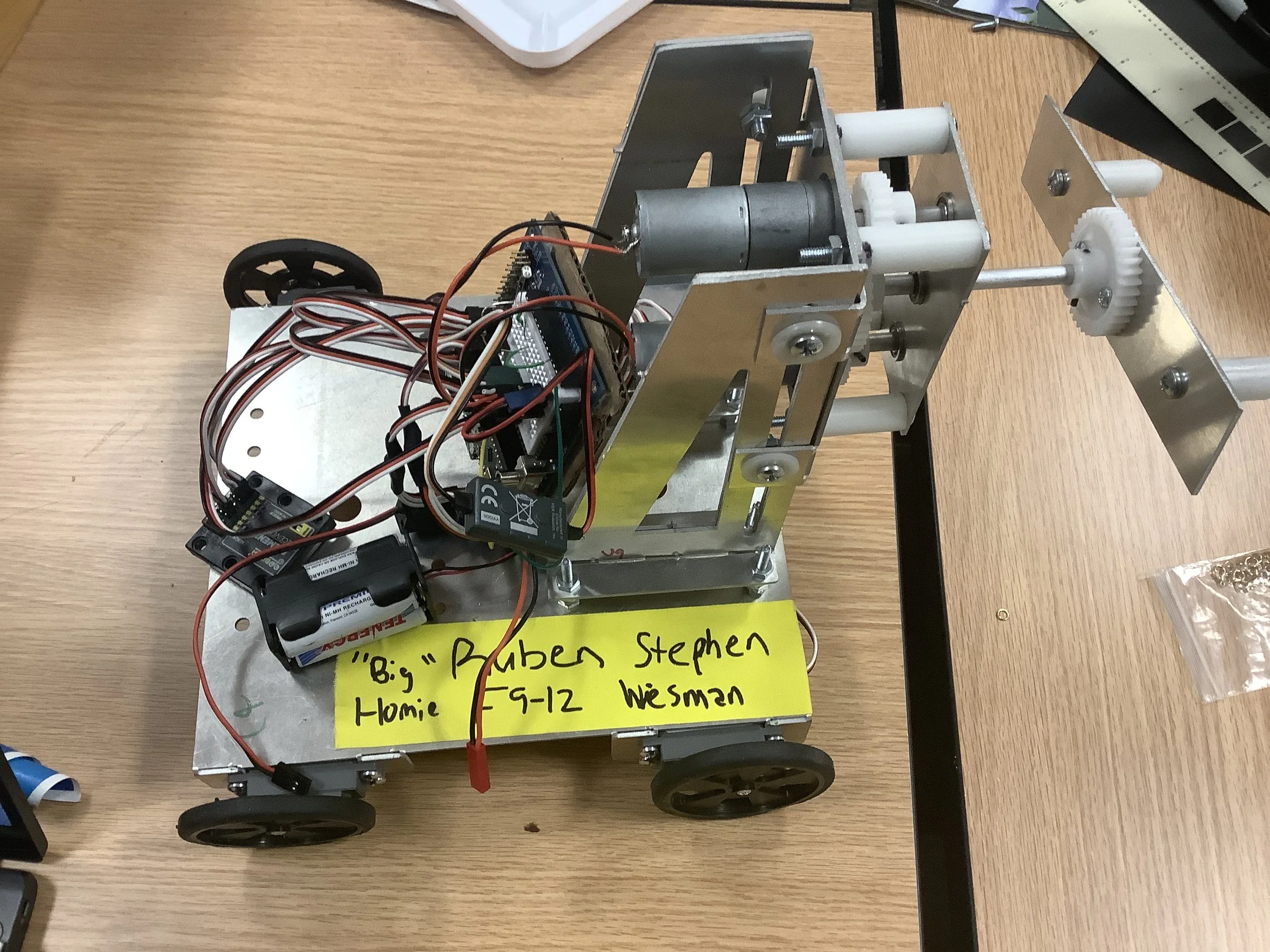
Initial Prototype of Gearbox + Drive Train prior to mounting
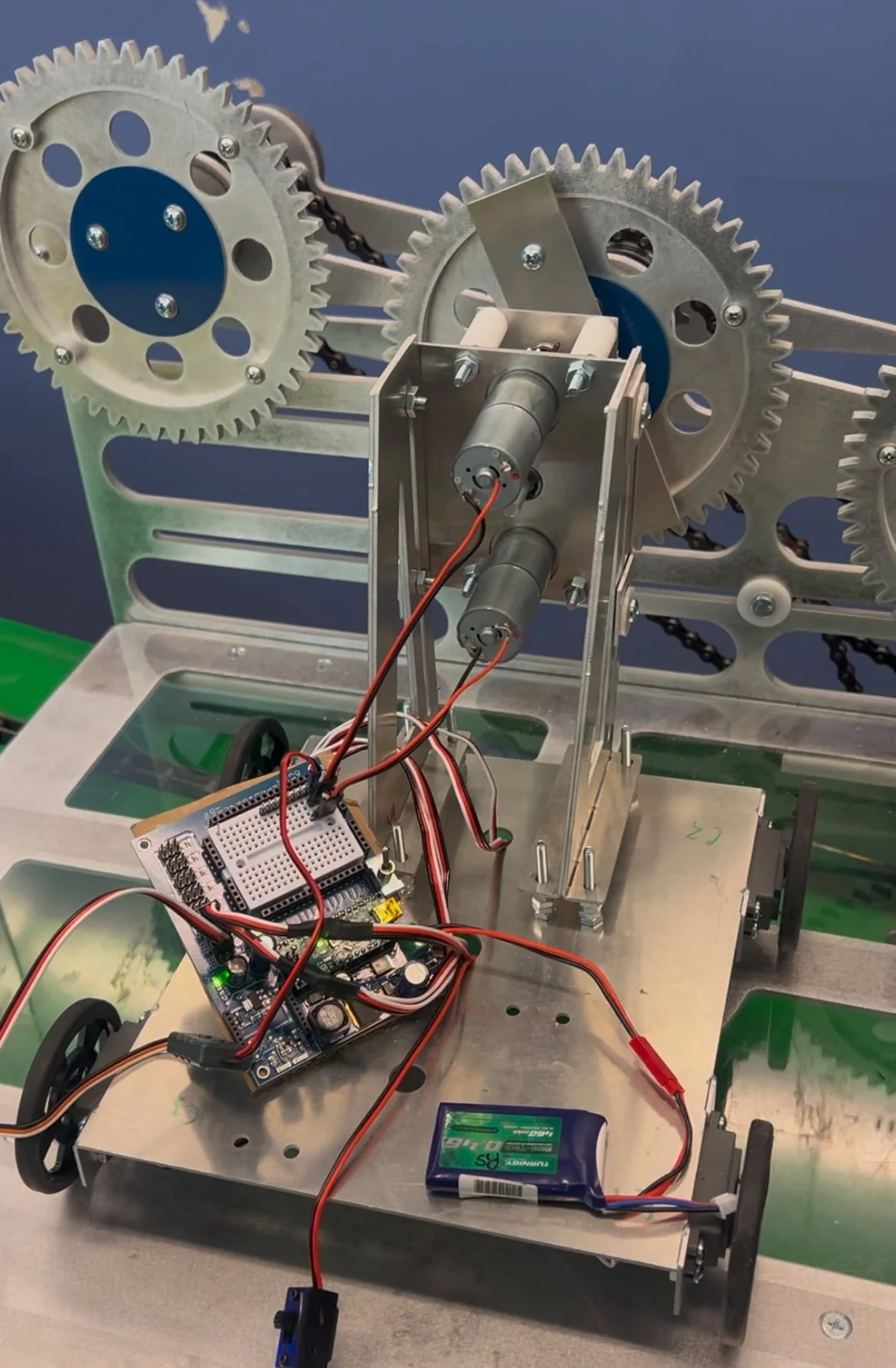
Gearbox and Drive train mounted to robot chassis via tab-slot design
Autonomous Control Logic
Photoelectric sensor trigger system for autonomous period initialization (rules prohibited physical contact to start)
Programmed autonomous-to-manual mode switching after first obstacle clearance, maximizing doubled autonomous scoring while preserving manual control for complex maneuvers
Achieved 50% reliability (5/10 consecutive test runs) completing both train and balloon tasks within the 2-minute match window
Video demonstration of photoelectric sensor trigger system for autonomous period
Video demonstration of autonomous-to-manual operation for completion of both Train and Balloon challenges
Fabrication & Integration
Robot design was modeled and iterated in SolidWorks prior to fabrication.
Components were manufactured using manual machining (mill, lathe, drill press), sheet metal fabrication, waterjet cutting, and 3D printing.
Development emphasized rapid iteration and subsystem integration under compressed competition timelines
Outcomes & Recognition
Successfully demonstrated hybrid autonomous/manual operation under competition constraints
Implemented modular reconfiguration strategy allowing adaptation between left/right field sides within 5-minute setup windows
Glinda Prize Winner: Awarded for "most elegant, regal, and stunning robot" based on technical sophistication, autonomous functionality, and creative engineering execution
Reflection
In retrospect, I would place greater emphasis on robustness and repeatability earlier in the design cycle. While the adjustable drivetrain improved adaptability between competition setups, it also introduced additional tuning complexity and assembly overhead during live operation.
I would also further prioritize subsystem testing earlier in development to have potentially caught the power issue before competition night